Exploration strategies based on artificial vision with heterogeneous robots.
- Start date: September -- 2019
- Product: Master's Thesis
- Student: William Leith Salas
- Contact: williamleith@cio.mx
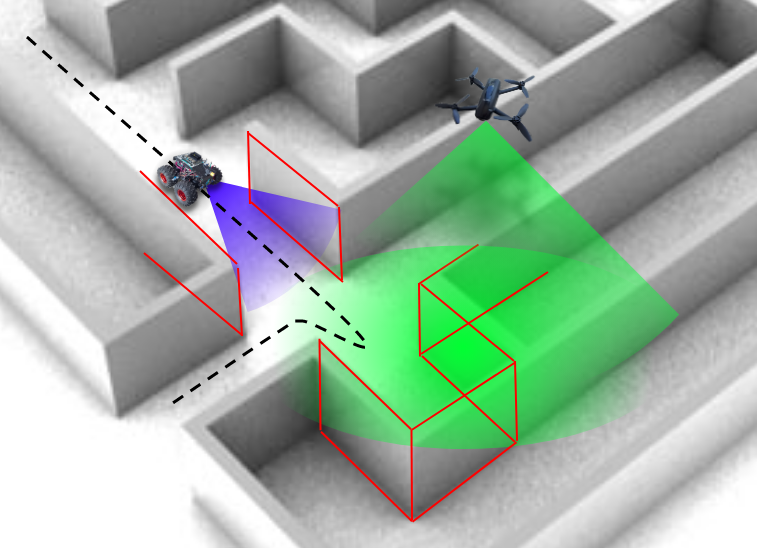
- Objetive: Develop an autonomous system for exploring indoor environments based on images from vision sensors mounted on ground and aerial robot.
Description: Develop the technology necessary to allow two heterogeneous robots to locate and move autonomously with respect to each other, so that together they are able to explore an unknown environment.