Estrategias de exploración de ambientes con base en visión artificial utilizando robots heterogéneos.
- Inicio: Sep. -- 2019
- Tipo de Tesis: Maestría
- Estudiante: William Leith Salas
- Contacto: williamleith@cio.mx
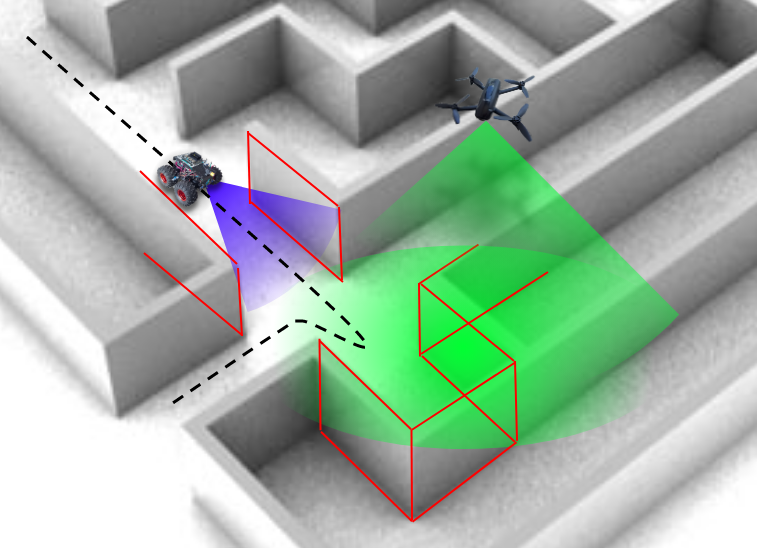
- Objetivo: Desarrollar un sistema autónomo de exploración de ambientes de interior con base en imágenes provenientes de sensores de visión montados sobre un vehı́culo aéreo y un vehı́culo terrestre.
Descripción: Desarrollar las tecnologías necesarias para permitir que los robots heterogéneos se localicen y se muevan de manera autónoma uno con respecto uno del otro y, de esta manera en conjunto, mejorar la navegación teniendo, más información del entorno en el que se encuentran.